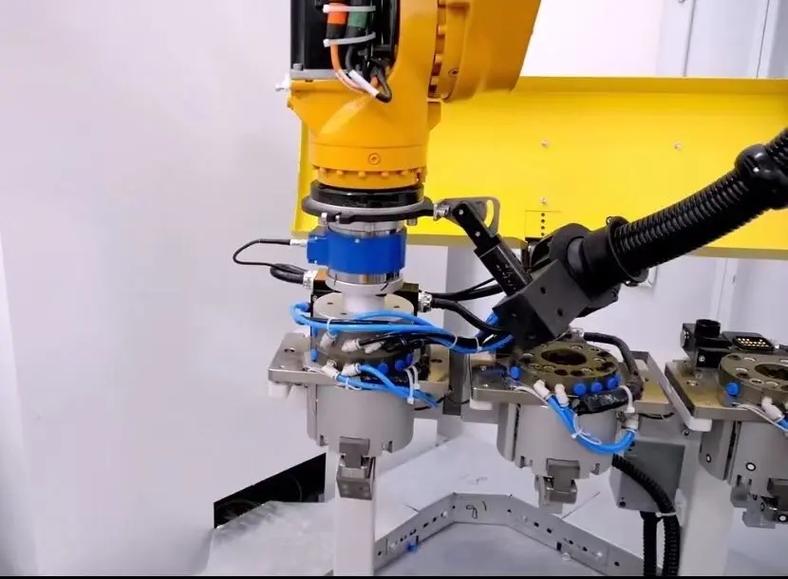
工业信任不是凭空来的。 它建立在每一次精准停止,每一次速度降低,每一次力反馈上。说实话,如果机器人有丝毫不可靠,没人敢把后背交给一台机器——对吧?
ISO/TS 15066:协作的灵魂
功能安全标准ISO 13849我们都很熟了。但协作机器人必须额外啃透ISO/TS 15066。这份技术规范列出了人机接触的力与压力阈值——别小看这些数字,它们直接定义了什么叫做“不受伤”。比如头部碰撞,瞬态接触允许的最大压力是175N/cm²。这不是拍脑袋定的,是生物力学实验数据,是活人志愿者测出来的(想想就疼)。所以,你以为的“安全”不是感觉,是算出来的。系统根据速度、质量、关节扭矩实时调整。如果控制回路里任何一个传感器数据异常,机器人必须停下来——立刻,马上,不带犹豫。❗
信任崩塌的一瞬间
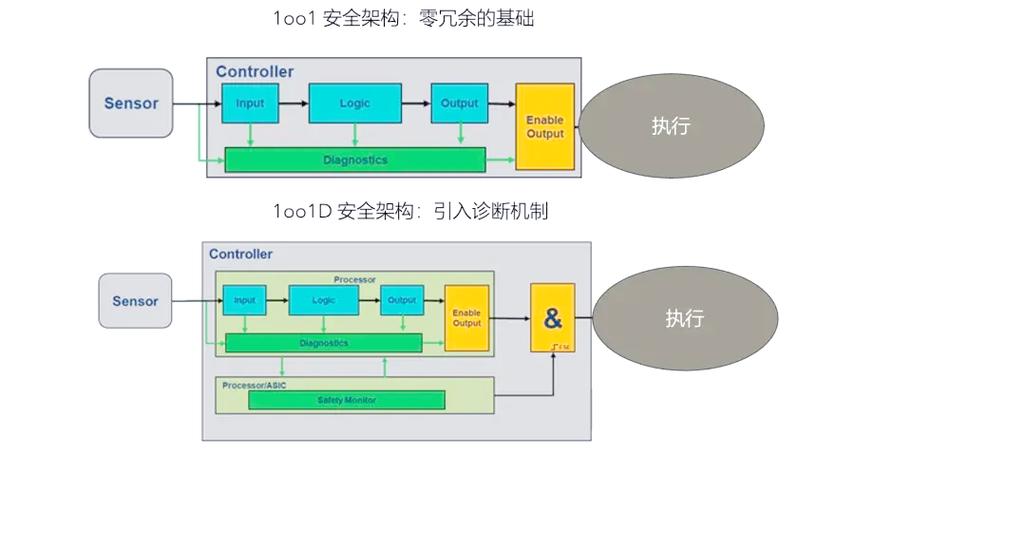
说起来有点丢脸。我曾被一台协作机器人吓到过。那是一次内部培训,机器人突然全速运动——虽然路径规划避开我,但那种毫无预兆的爆发力,让我本能地后退。瞬间信任归零。后来才知道是有人误触了“全速模式”切换开关。💡 信任的建立需要无数次重复,但摧毁它只需要一次意外。 而工业环境复杂,振动、电磁干扰、传感器老化,都可能让安全功能失效。怎么办?冗余。双通道。自诊断。比如安全扭矩关闭(STO)功能,几乎成了标配。但STO触发时,机械臂会因重力坠落——那砸到人怎么办?所以很多协作臂配了制动器,断电即刹紧。这些设计细节,才是信任的基石。不是PPT上的鼓吹。
人类的那点小心思
有些工厂用AR眼镜投射机器人安全区域,酷毙了。但成本高。我更欣赏一个简单招数:地面投影。机器人底座射出一个动态光圈,清晰显示触碰边界。这比任何警示标志都直接。
问:协作机器人真的不需要安全围栏吗?
答:看情况。如果应用经过风险评估,满足速度、力、功率等限制条件,并且有可靠的功能安全系统,确实可以不用围栏。但用于搬运利刃、高温工件时,围栏仍可能是必须的。千万不要看到“协作”二字就放松警惕——那是一份责任,不是豁免。⚠️
问:如何确保机器人在发生故障时不会伤人?
答:核心是冗余安全系统。譬如,每个关节都有主、副编码器,主控板卡故障时,安全板立即介入,切断力矩并执行制动。同时,基于模型的速度监控可预测异常加速度,提前响应。这不是理论,是每毫秒都在进行的生死判定。
但话说回来,再完美的系统也怕人为短路。我见过操作员为了效率,用磁铁屏蔽门锁开关。那一刻,所有精心设计的安全架构全废。所以,最终的信任闭环,离不开人的安全意识。机器可以承担99%的责任,但最后1%是人的素养。 这或许就是工业自动化的哲学——技术与人性的永恒拔河。