这事要从上个月说起——我眼睁睁看着一台机械臂在测试线上一头栽进物料箱,那场面,简直像极了小孩学步时摔进泥坑。💥 当时团队里那位老工程师嘟囔了一句:“这玩意儿,缺份成长报告。” 这话一下子击中了我。做了十年育儿内容,突然觉得,工业产品和人类幼崽的发育轨迹,简直异曲同工。所以,今天咱不聊娃,聊聊这些铁疙瘩的“童年”。
宝宝的第一次翻身?不,是原型机的第一次通电
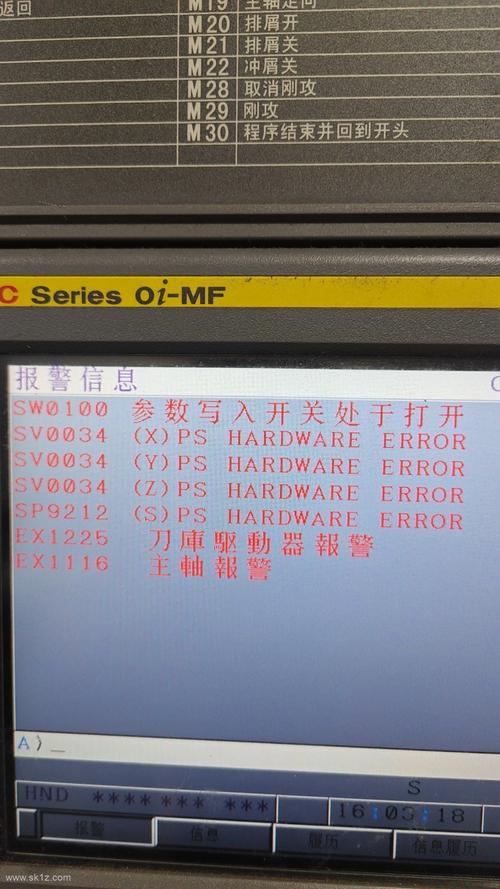
你知道么,一台新设备从图纸到通电那一瞬间,工程师心跳得比产妇等第一声啼哭还快。首先得有个原始设计——就像基因。然后,原型机(prototype)出生了,一堆散装的电路板、电机、传感器乱糟糟堆在铁架上,像早产儿进了保温箱。通电过程永远充满玄学:屏住呼吸,按下开关……然后祈祷别冒烟。❗ 我有次见到继电器噼啪响,火星子都蹦出来了,旁边00后技术员吓得连退三步。但这就是成长啊,没经历过短路和冒烟的原型机,不配谈量产。
成长报告的第一页,不是性能参数,是故障日志。我们得像记录婴儿疹子一样,记下每一次异常抖动、过热、通讯中断。✅ 比如:
- 第一天:右臂伺服电机异响,排查后发现润滑脂涂得太厚——像给新生儿穿太多,闷出了痱子。
- 第三天:视觉系统误把工程师的咖啡杯识别为工件——这事儿我能笑一年,跟小孩指着猫叫狗狗一个路数。
从满地乱爬到精准操作——机器人“学走路”实录
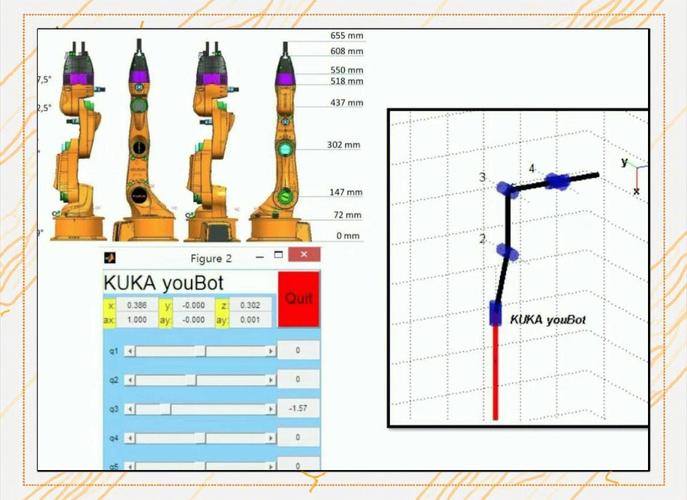
你见过机器人第一次动起来的样子吗?晃晃悠悠,关节咯吱响,末端执行器抖得像个帕金森患者。这叫运动学调试(kinematic tuning),说白了就是教它协调肢体。我们得一遍遍修改控制算法,就像教孩子怎么用手搭积木。💡 有个偏方:先让它空跑轨迹,不夹取任何东西,练个几百小时——这不就是“爬行期”嘛,强化肌肉记忆。然后才敢上真实物料,从轻到重,从慢到快。这中间能炸掉多少个减速机?数不清。但每一份精准的成长报告都会记下:第42次运行,重复定位精度终于达到±0.02mm,相当于幼儿终于能用勺子舀起豌豆而不洒。
问:原型机调试老是撞机怎么办?
答:别急着骂设备,先查传感器融合是不是有延迟。就像孩子接球总接不住,不是手笨,是视觉-运动协调还没建立。我们一般会给机器人做“感统训练”——没错,这个词我从早教中心偷来的——把视觉、力觉、位置反馈的采样率对齐,加个卡尔曼滤波,马上稳如老狗。还有,限位开关的复位弹簧别省,关键时刻能救人一命,也救设备一命,算是“防撞护栏”。
会说话的孩子惹人爱?交互系统养成指南
工业机器人现在没个HMI(人机界面)简直不好意思出门。但很多厂家的界面,死板得像上世纪的电报员——点一下,等三秒,吐个代码。这哪行?交互成长也得记入报告。我们团队曾花三个月,就为了把操作系统的响应延迟从200毫秒压到50毫秒以内,因为操作工会骂:“老子手都举酸了它还没反应!” 这就像孩子开口晚,急死人。
后来我们给系统加了预测性UI和语音反馈,比如夹爪靠近工件时屏幕自动高亮安全区域,并模拟人声提示:“距离工件5厘米,减速。” 你猜怎么着?操作失误率暴跌40%。说白了,机器人得学会“看眼色”,甚至要有点“同理心”——知道人会犯错,提前给台阶下。这跟培养高情商孩子的路数,一模一样。
问:语音交互如何在嘈杂车间里不误触发?
答:这事踩过坑。最早用普通麦克风阵列,车间里打螺丝的气泵一开,机器人就以为有人喊“急停”,咣当就杵那儿了。后来我们上了一套骨传导+声纹识别的方案,只认特定操作员的声音,而且得配合一个物理按键才激活语音指令。就像教孩子:人多的时候别乱答应陌生人。现在很灵光,哪怕旁边在拆楼,它也只听贴身的耳语。✅
成长报告中的隐藏彩蛋:环境适应性
你以为设备在恒温恒湿车间表现完美就万事大吉了?太天真。客户现场可能有粉尘、油污、电压波动,甚至是老鼠咬电缆。我们每次出货前,会故意把机器拖到户外暴晒两天,或者往电柜里扬一把面粉,然后测绝缘和散热——这叫鲁棒性测试。记录下来的数据,比育儿手册里的“夜间哭闹应对法”还厚。一份有良心的成长报告,必须包含这些“受虐史”,因为它直接关系到设备离厂后是成为劳模还是返修钉子户。
记得有台AGV(自动导引车),在食品厂被糖霜糊了激光雷达,原地转圈罢工。后来我们给雷达加了压缩空气自清洁,并写入报告:“见糖霜即刻开启自洁,如同见到甜食前先洗手。” 这教训值十万块。
最终,每一次交付的设备,都带着一本厚厚的成长报告,从蹒跚学步到独当一面。 它可能不会喊爸爸妈妈,但每个指示灯、每个参数,都在诉说着那段被精心打磨的历程。而作为制造者,我们唯一的私心,就是希望多年后它退役时,还能被某个工程师记起——就像记起一个长大了的孩子。